Koishi Forum
not-command:机器人被at时,如果消息不会被指令或中间件响应则反馈一条消息
插件发布
windbullet
2024 年12 月 2 日 03:14
1
配置项介绍:
feedback
反馈消息
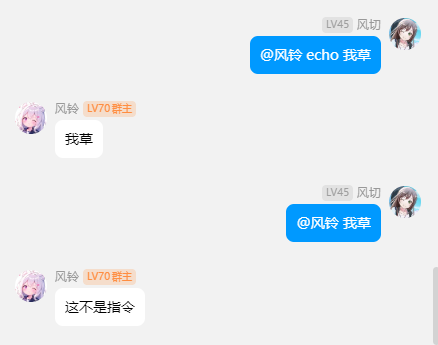
演示:
4 个赞
用户输入了非指令内容后,如何让bot回复一条提醒消息?